2026/02/02(月)GreenPAK Brushless DC Motor Control
はじめに
DCモーターは近年ますます頻繁に使用されるようになり、コントローラーハードウェアと駆動方法論の継続的な改善による効率性の利点が増大しているため、従来のACモーターに取って代わるケースが多くなっています。直流モーターの中でも、ブラシレス直流モーターはブラシの物理的接触による摩耗がないため、
産業用途だけでなく一部の民生用途でも広く普及している。
代わりに、磁気センサーで検知した回転角度に応じて駆動タイミングを制御する必要がある。ホールセンサーは最も一般的に使用されるセンサーの一つである。
基本動作原理を示す簡易DCモーター(左図)と
ブラシレスDCモーター(右図)を図1に示す。
DCモーター(左図)は、ロータコイルの電流
流れ方向を切り替えるためのブラシを有する。
これにより磁界の方向が変化し、固定子磁石に
引き寄せられるロータの一端と反発される
他端を制御する。
一方、ブラシレスDCモーター(右側)では、
磁気センサー(ホールセンサー)と同期した
ドライバーにより、ブラシではなく電流切り替えを制御する必要がある。
センサー出力は、固定子コイル内の電流の流れのタイミングと方向を処理するコントローラーに入力される。
DCモーターにおける典型的なホールセンサー出力波形を図2に示す。この信号は回転子の回転周波数と一致する。通常、振幅VHは数十ミリボルトで、オフセット電圧の変動幅は広い。
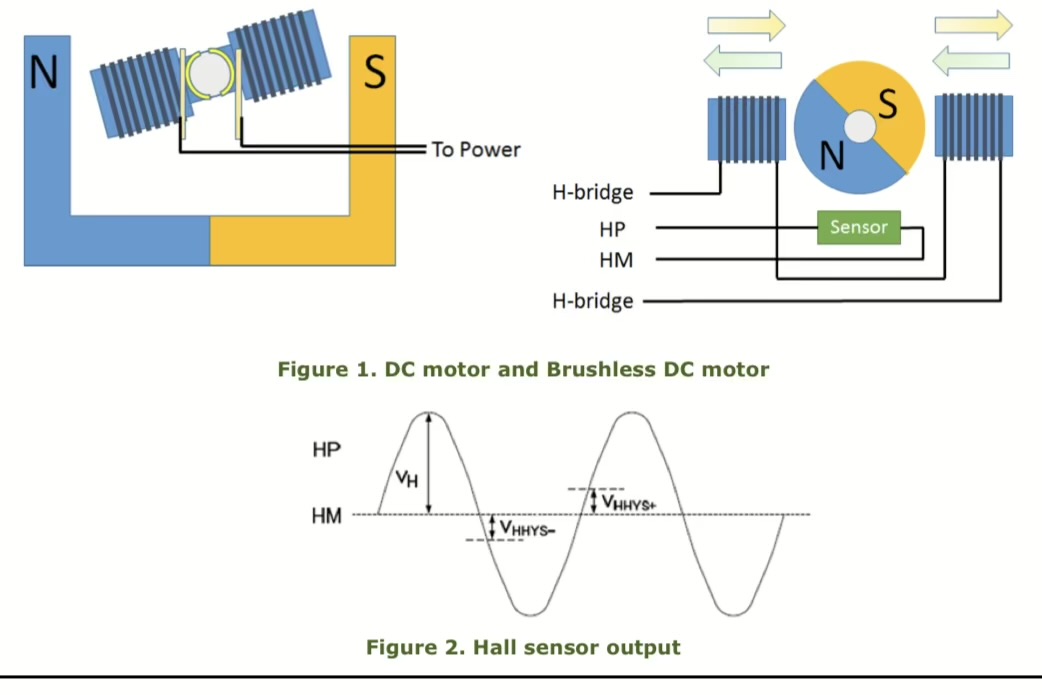
オフセットを補正し、ホール信号から方形波を得るために、外部オペアンプまたはコンパレータの使用が推奨される。
この方形波の立ち上がりエッジは、後述する駆動信号のタイミング生成に用いられる。
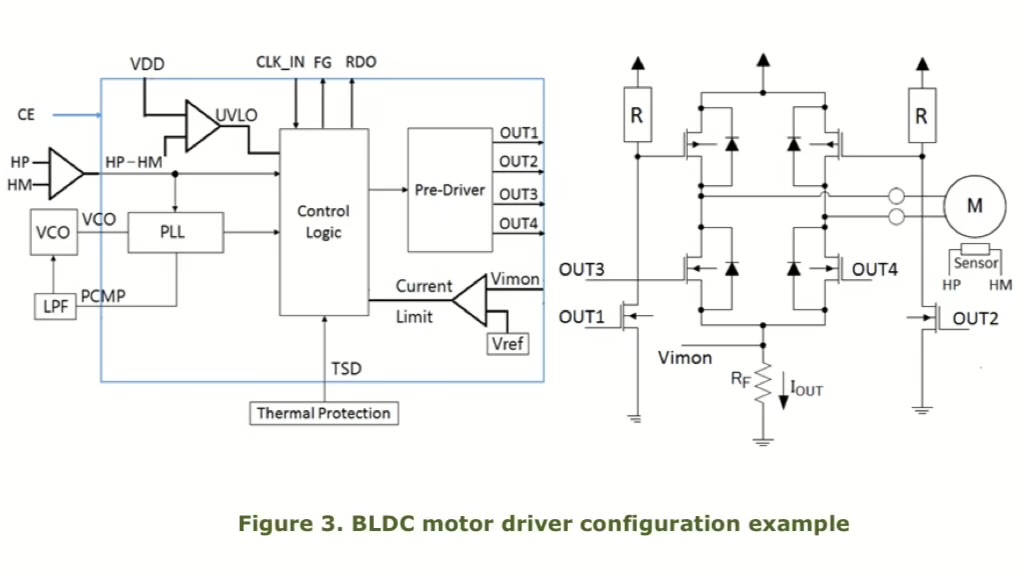
本アプリケーションノートでは単相ブラシレスDCモータについて論じる。
図3は本システムで使用される部品と接続を示すブラシレスDCモータ回路図の一例である。HPおよびHMは対象モータのホールセンサから出力され、その回転角度と速度を表す。
HPとHMの電圧レベルを比較して方形波HP-HMを生成している。この信号はPLLの基準信号として、またプリドライバ出力のセレクタ信号として機能する。
OUT1~OUT4は対象モーターを駆動するHブリッジに接続されている。回転停止、過電流、過熱、UVLOからの保護機能が組み込まれており、HブリッジFETをオフにする。
GreenPAKの前段にVCO(電圧制御発振器)を配置し、ホールセンサー信号との同期を実現している。
この同期の目的は、PWM駆動信号のソフトスタートとソフトストップのタイミング制御にある。ソフトスタートはホールセンサー信号の立ち上がり/立ち下がりエッジでトリガー可能だが、ソフトストップは信号終了前の特定のタイミングでトリガーする必要がある。
ホール信号と同期したカウンタを用いれば、駆動信号のPWMデューティサイクル制御を開始する
カウンタ値をプログラムできる(はず)。
一定回転速度アプリケーションではPLLは不要です。必要なのはPWMデューティサイクル制御用のカウンタ値をプログラムすることだけです。